
Ceci est une ancienne révision du document !
Table des matières
Sphero mini : Qu'est-ce que c'est ?
Une interface de programmation pour le robot Sphero mini.
Le robot Sphero mini : capable de détecter des obstacles, suivre une ligne, émettre des sons et des signaux lumineux, recevoir des ordres d’une télécommande ou communiquer par un canal infrarouge avec un autre robot.
- matrice d'affichage à LED
- gamme complète de modules capteurs/actionneurs avec connectique RJ25
- échange de données par câble USB ou Bluetooth
- suiveur de ligne
- capteur ultrason
L'interface
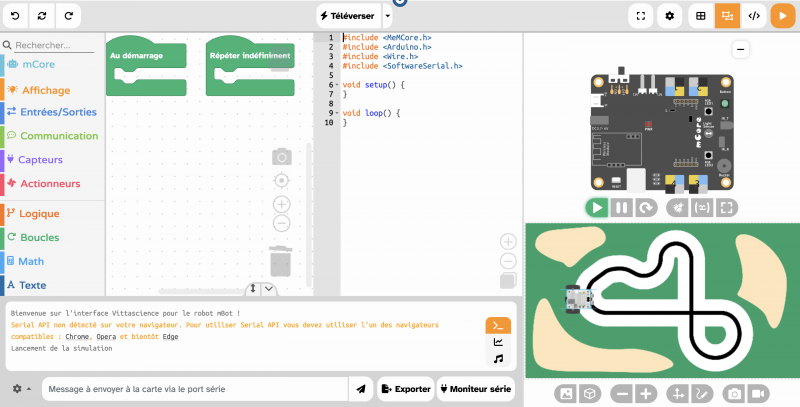
Cette interface est composée de 5 parties :
- le menu, situé en haut. Via les icônes, on accède aux paramètres ou au fonctions d’exécution du code, mais aussi à la gestion des affichages.
- les catégories des blocs, à gauche, dans lesquelles sont rangés les éléments à piocher pour construire le programme. Accompagné d'une zone de construction, qui permet l’assemblage des blocs pour créer le programme.
- la zone de code, située au centre, qui affiche le code en langage Python
- le simulateur, situé à droite, qui permet de simuler les cartes, capteurs et microcontrôleur sans le matériel.
- la console, située en bas, qui montre le programme exécuté. Il est également possible d'interagir avec son programme dans cette console.
Les blocs “Au démarrage” et “Répéter indéfiniment” sont les éléments clés du fonctionnement de la carte. Ils sont présents dès l'ouverture de l'interface. Les instructions placées dans le bloc “Au démarrage”, seront exécutées dès l'alimentation en électricité de la carte. Alors que les instructions du programme placées dans le bloc “Répéter indéfiniment”, seront exécutées après le démarrage et ensuite en continu jusqu'à ce que la carte ne soit plus alimentée en électricité.
Naviguer sur l'interface
 Envoyer le programme Python dans la carte :
Envoyer le programme Python dans la carte :
le code est exécuté sur la carte dès la fin du transfert.
 Télécharger le script Arduino :
Télécharger le script Arduino :
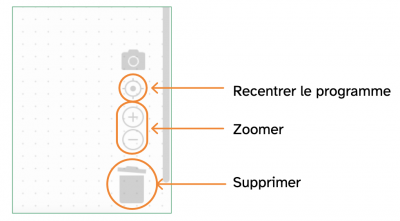
 Annuler ou rétablir :
Annuler ou rétablir :
les actions précédentes ou suivantes.
Les points forts de l'interface
Traduction du code assemblé par blocs en C++
Le langage C++ est difficile à appréhender, notamment pour les débutants. L'interface mBot permet de débuter avec la logique de programmation par bloc, qui élimine le risque d'erreur de syntaxe, puis de passer en douceur au code textuel C++.
Transfert du code vers la carte et le robot en 1 clic !
Le système permet le transfert d'un programme sans aucune installation de driver ou logiciel (avec les navigateurs compatibles Chrome, Edge, Opéra, Safari ; sur Firefox le téléchargement de programme est possible via un glisser-déposer).
Simulateur
L'interface mBot embarque un simulateur, ce qui permet d'exécuter un programme sans avoir de matériel ! La quasi-totalité des blocs sont disponibles dans le simulateur, ce qui permet de réaliser de très nombreux projets. Découvrez la liste des blocs disponible dans l'interface.
Traceur de graphe en temps réel
L'interface permet de tracer un graphique à partir des données reçues par la carte en temps réel, puis d'exporter ces données en toute simplicité aux formats CSV ou API. Le traceur de graphe fonctionne également avec le simulateur pour encore mieux tester vos programmes avant de passer au réel !